Frankie Dong LiI am currently a Graduate Student at Macau University of Science and Technology (MUST) and the Institute of Automation, Chinese Academy of Sciences (CASIA), supervised by Prof.Long Chen and Prof.Fei-Yue Wang, working on Space Robotics. I was a Research Assistant from The Intelligent Machine Research Lab (IMRL) in the SKL-IOTSC at the University of Macau, supervised by Prof. Hui Kong. Before that, I worked as a Research Assistant for one year from June 2022 to June 2023, in the Autonomous and Multi-Agent Systems Research Lab (AMAS-Lab) at the Department of Electronic and Electrical Engineering of Southern University of Science and Technology (SUSTech), supervised by Prof. Zhiyun Lin. I received the B. Eng. degree from the School of Computer and Information Engineering, Hefei University of Technology in June 2022. During my undergraduate years, I was a founder of the robotics team at Hefei University of Technology and participated in the RoboMaster Robotics Competition from 2019 to 2021. When I was studying at Fuyang No.3 High School, I was sponsored as a Pearl Student by the Xin Hua Education Foundation (XHEF). I'm truly thankful to them! |

|
ResearchI have broad interests in foundational methods and applications in robotics and 3D vision. Specifically, my current research focuses on Field Robotics and Space Robotics. Feel free to reach out to discuss ideas or collaborations~ As an active contributor to the robotics and 3D vision communities, I maintain several popular curated repositories (awesome lists and paper collections):
Feel free to star, fork, or contribute — collaborations are always welcome! 🚀 |







{kind=link}
News[Jun 2026] The co-author work SpikeVLA and Denoising the Deep Sky have been accepted by ICML 2026 and ECCV 2026 respectively. [Jun 2026] Invited as a reviewer for IEEE Transactions on Robotics (T-RO). [Jun 2026] Attending ICRA 2026 (Vienna). Looking to connect on Space Robotics, Field Robotics, SLAM, and Autonomous Exploration. [May 2026] Invited to review 2 manuscripts for The International Journal of Robotics Research (IJRR). [Apr 2026] 我们合作的综述论文 机器人灵巧手:迈向通用操作的关键技术 被中国图形图形学报接收. [Jan 2026] We are organizing the Special Session “Robotics in Space Exploration” at IROS 2026. More information can be found here. [Dec 2025] GauSem-SLAM has been accepted by ICRA 2026. See you in Vienna!. [Dec 2025] Our survey on 3D Scene Representation is available on arXiv, and Chinese introduction available for 机器之心. [Oct 2025] I will travel to Hangzhou, China to attend IROS 2025. [Sep 2025] The co-author work GaussR-SLAM has been accepted by RAL~ [Jul 2025] SLAM-X and Wild3A have been accepted by ACM MM 2025! [Jun 2025] TWC-SLAM and STG-Avatar have been accepted by IROS 2025~ [Jan 2025] The co-author work GARAD-SLAM has been accepted by ICRA 2025. [Nov 2024] The star count of our awesome-Implicit-NeRF-SLAM repository has reached 1K! [Oct 2024] I have received the RAS travel grant and will travel to Abu Dhabi, UAE to attend IROS 2024. [Jun 2024] UMAD has been accepted by IROS 2024! Thanks to everyone who participated in this project! |
Selected Publications |
|
He3-Seeker: Robotic Information Planning for Lunar Helium-3 Distribution MappingDong Li*, Yujie Zheng*, Chengdeng Cao, Siyu Teng, Yuchen Li, Yang Gao, Long Chen# Submitted to the International Conference on Space Robotics (iSpaRo) 2026 arxiv / code / Detection of dense Helium-3 distribution in the unexplored regions of the Moon |
|
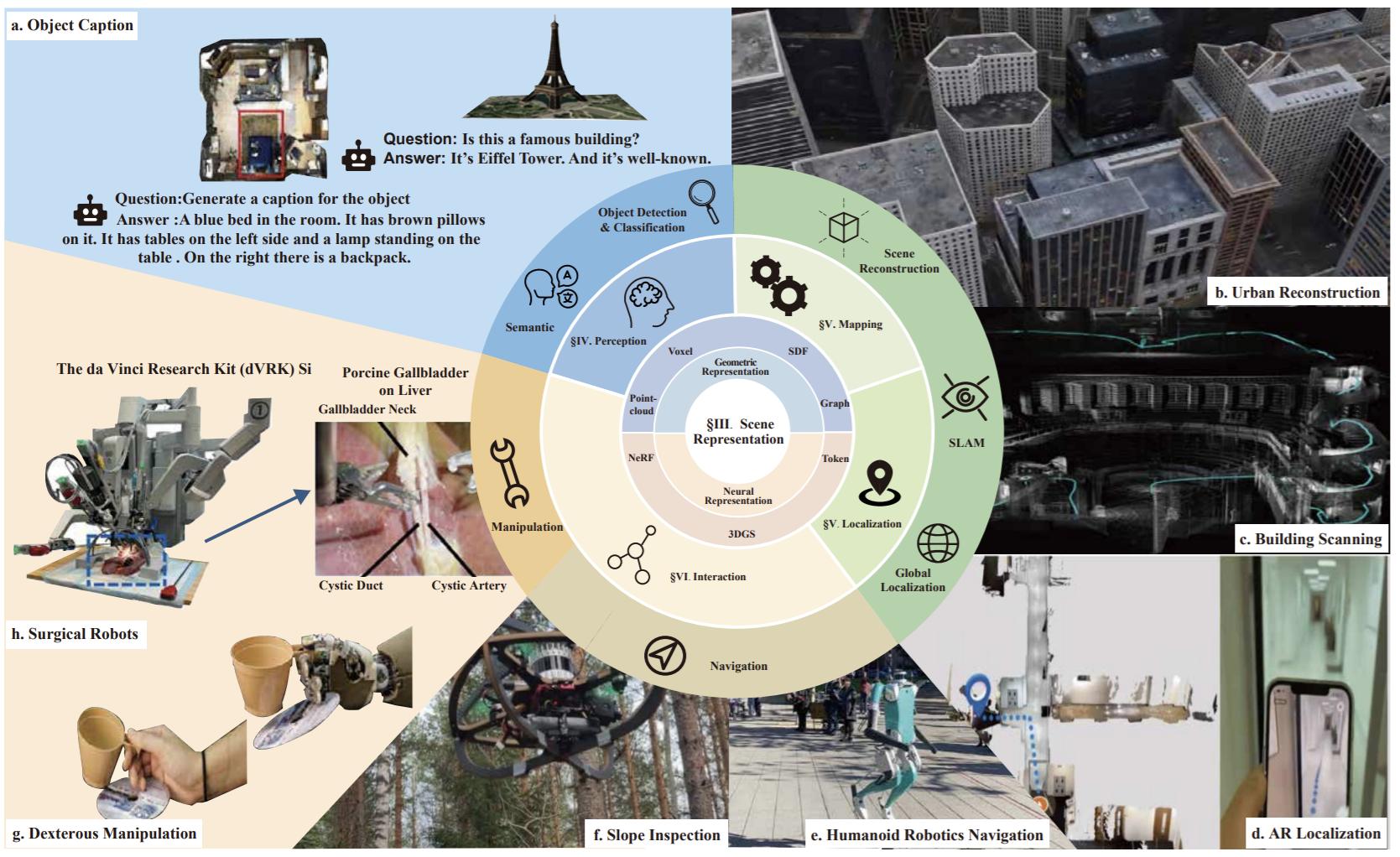
What Is The Best 3D Scene Representation for Robotics? From Geometric to Foundation ModelsTianchen Deng, Yue Pan, Shenghai Yuan, Dong Li, Chen Wang, Mingrui Li, Long Chen, Lihua Xie, Danwei Wang, Jingchuan Wang, Javier Civera, Hesheng Wang, Weidong Chen Submitted to IEEE Transactions on Robotics (T-RO) arxiv / code / 机器之心中文解读 / This paper categorizes core robotics modules into five parts: Perception, Mapping, Localization, Navigation, and Manipulation. It reviews standard 3D scene representation methods, compares their strengths and limitations across these modules, and addresses the central question: What is the best 3D scene representation for robotics? The paper further discusses future trends, focusing on how 3D Foundation Models could serve as a unified solution for robotic applications, while highlighting remaining challenges. It aims to provide a concise yet comprehensive resource for both newcomers and experts in the field. |
|
Wild3A: Novel View Synthesis from Any Dynamic Images in SecondsMingrui Li, Shuhao Zhai, Zibing Zhao, Luyue Sun, Xinxiao Wang, Dong Li#, Shuhong Liu, Hongyu Wang# ACM MM 2025 paper / code / Wild3A is a novel view synthesis framework that enables high-fidelity 3D reconstruction in unconstrained real-world environments in seconds, from arbitrary inputs. |
|
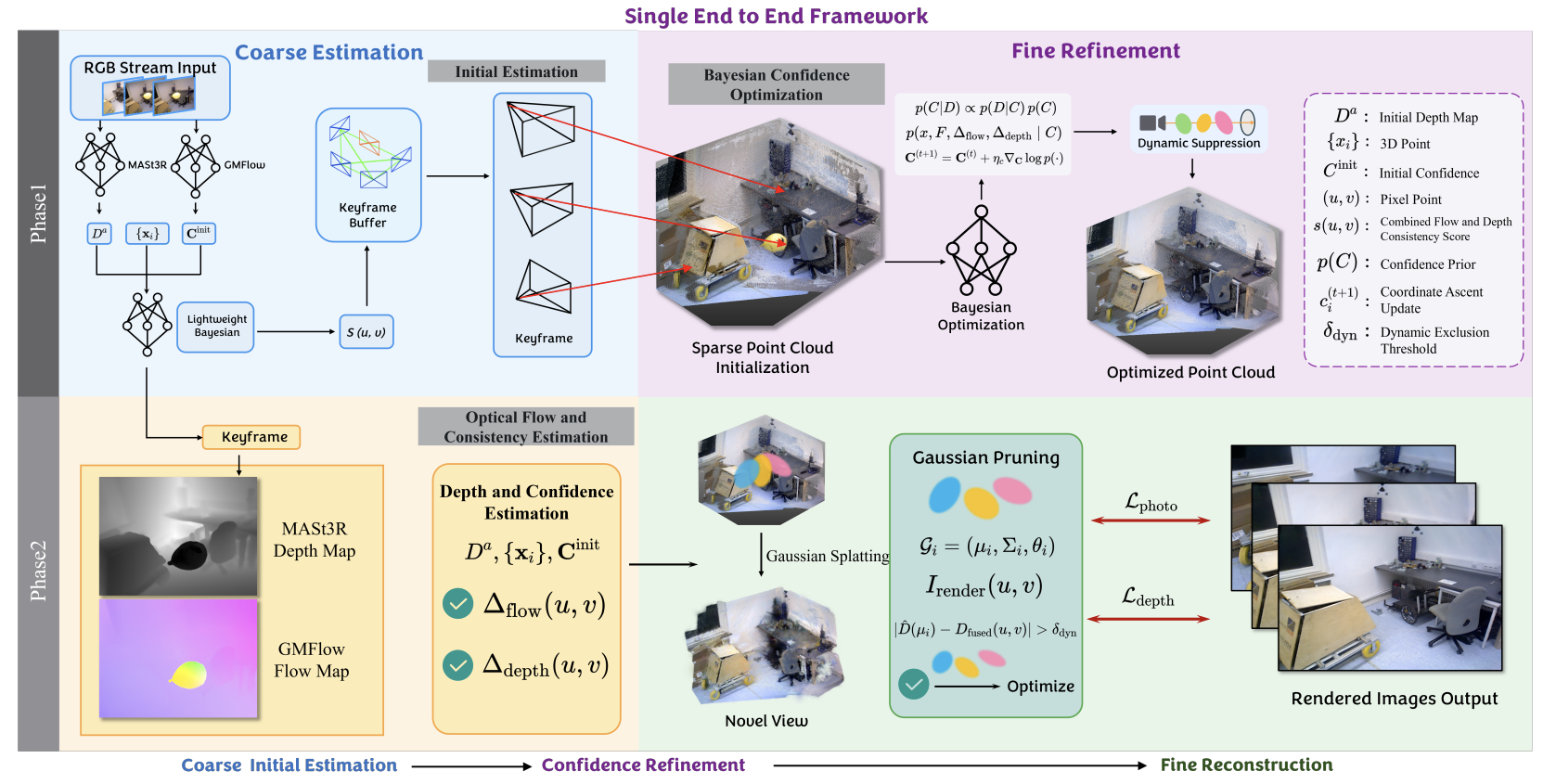
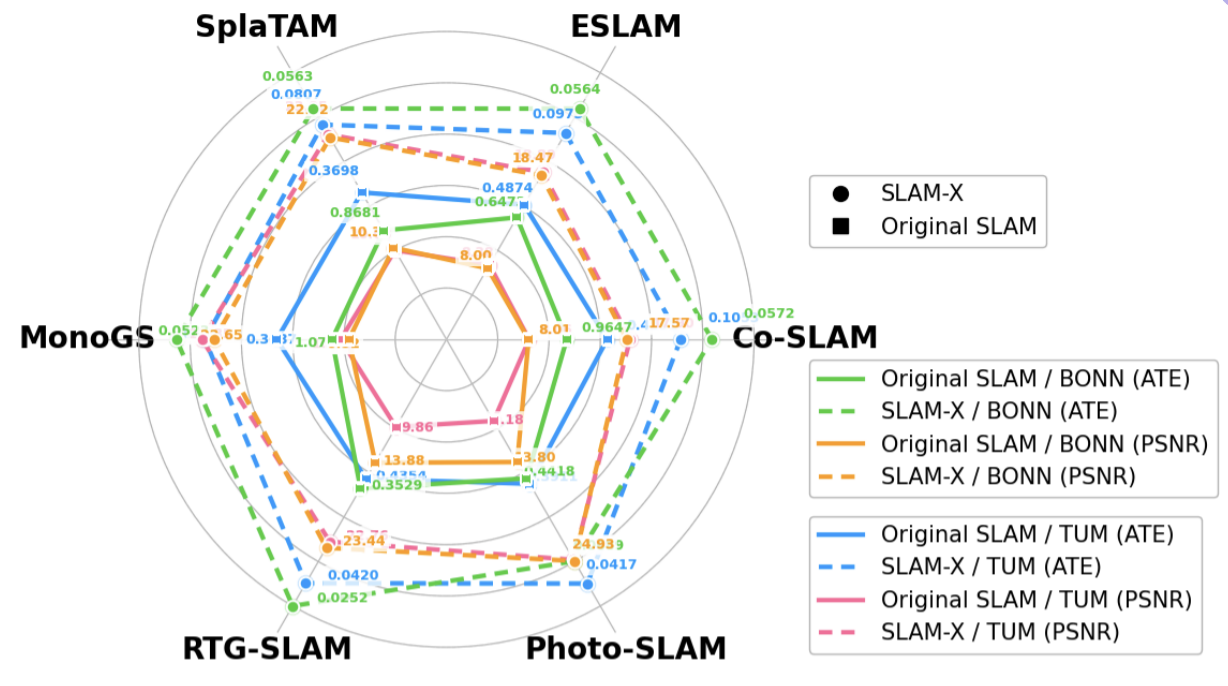
SLAM-X: Generalizable Dynamic Removal for NeRF and Gaussian Splatting SLAMMingrui Li*, Dong Li*, Sijia Hu, Kangxu Wang, Zhenjun Zhao, Hongyu Wang# ACM MM 2025 paper / code / SLAM-X is the first plug-and-play module designed to universally enhance dynamic scene handling across a range of SLAM architectures. |
|
GARAD-SLAM: 3D GAussian splatting for Real-time Anti Dynamic SLAMMingrui Li, Weijian Chen, Na Cheng, Jingyuan Xu, Dong Li#, Hongyu Wang# (Co-corresponding authors) International Conference on Robotics and Automation (ICRA), 2025 paper / arxiv / video / code / review comments / GARAD-SLAM is the first 3DGS-based SLAM system designed specifically for dynamic scenes. |
|
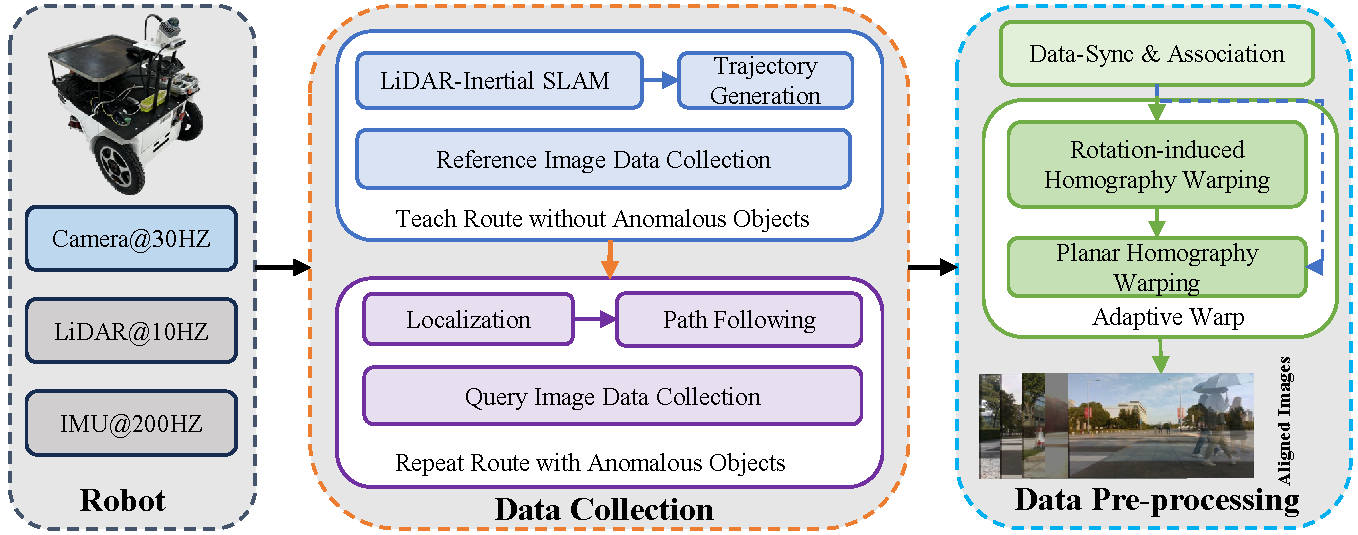
UMAD: University of Macau Anomaly Detection Benchmark DatasetDong Li, Lineng Chen, Cheng-Zhong Xu, Hui Kong# IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 paper / arxiv / video / code / poster / website / review comments / A large-scale reference-based anomaly detection benchmark dataset that captures real-world scenarios. UMAD is applicable for both Change Detection and Anomaly Detection tasks. |
Projects |
|
GitHub Repository: awesome-Implicit-NeRF-SLAMcode / A comprehensive list of Implicit Representations, NeRF and 3D Gaussian Splatting papers relating to SLAM/Robotics domain, including papers, videos, codes, and related websites. |

|
Undergraduate Project, 2018-2022Document / During my undergraduate studies, I worked on several projects related to robotics and electronics, including Unmanned Surface Vehicle (USV), Underwater Robot, Intelligent Sorting Trash Can, Automatic Tracking, Identification, and Measuring Device, SLAM-based Mobile Robot, and Robomaster Robots. For more information, please refer to the document. |
|
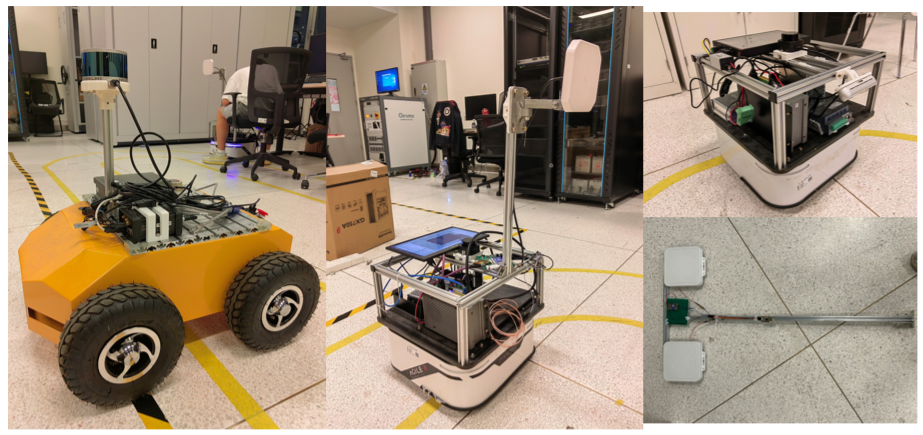
Robotics Projects at SUSTech, 2022-2023code / While I was a Research Assistant at SUSTech, I developed various robotic platforms, including mobile robots and robotic arms. I utilized a range of sensors such as 2D/3D Lidar, depth cameras, millimeter-wave radar, and RFID, I implemented V-SLAM(ORB-SLAM, VINS, and RTAPMAP), Lidar-SLAM(Cartographer, LOAM/Lego-LOAM). I also developed a grasping system based on tags. |
Honors & Awards
|
Services
Conference ServicesConference ReviewersJournal Reviewers |
|
Design and source code from Leonid Keselman's Jekyll fork of Jon Barron's website |